

Arcade Lower

Arcade Upper 1

Arcade Upper 2

Arcade Upper 2 (Elevation)
Once we have the scans indexed we are at a stage where we can supply the combined point cloud to our client. Our native formats are RCP, RCS, PTS or E57, but we can generally supply this in whatever format the clients requires it.
The next step is in the process would be to generate accurate 2D CAD Drawings or 3D models from the Point Cloud. We have a number of different ways to achieve this depending on the complexity of the point cloud and the desired end result required. We will use a software package such as AutoCAD, Sketch-up, 3DS Max or Revite to generate the model or we may use a scan to mesh package, but this really depends on the project.
Below are some screen captures of the finished Arcade Model in Sketch-Up.
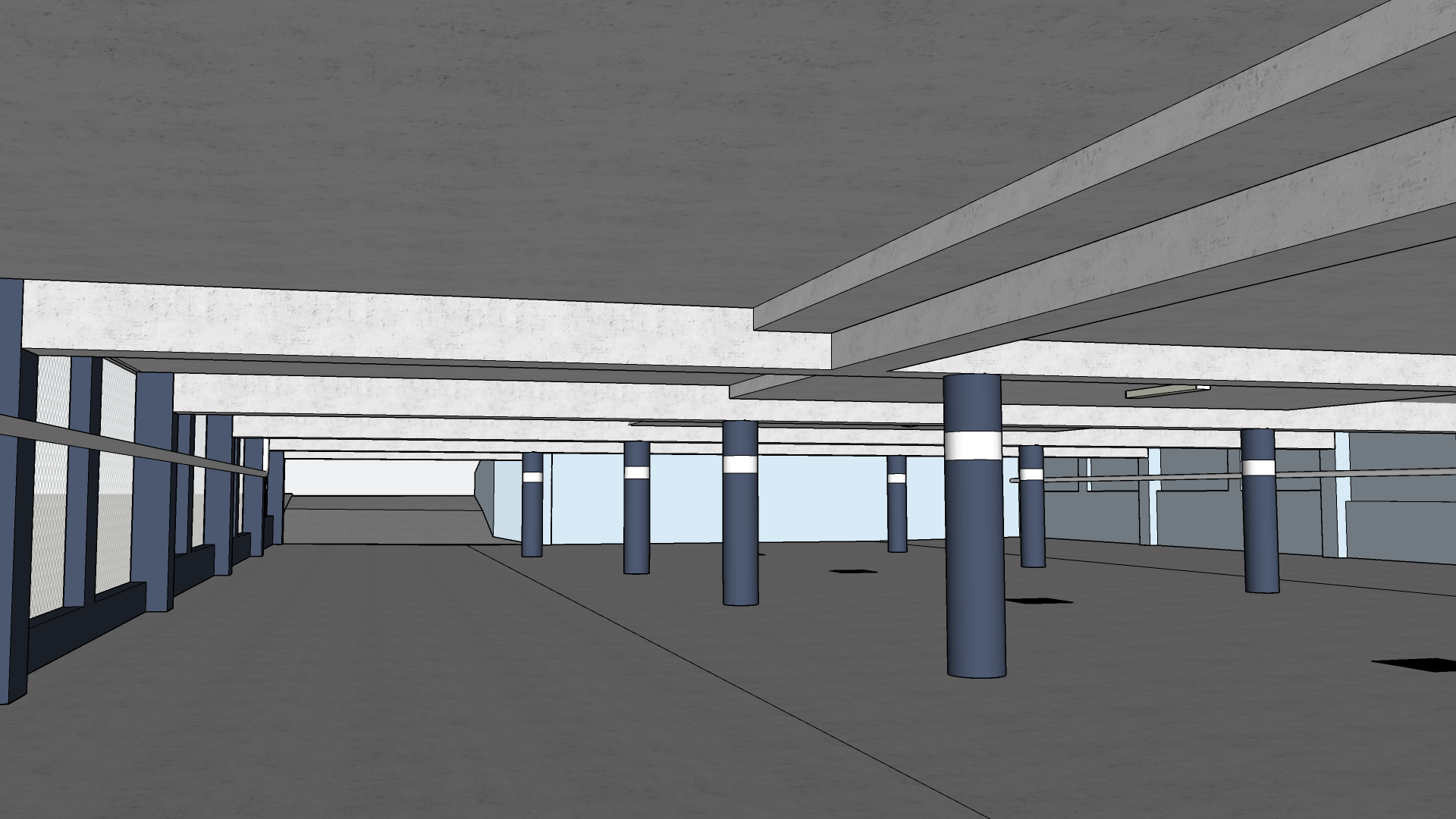
Arcade Lower 1
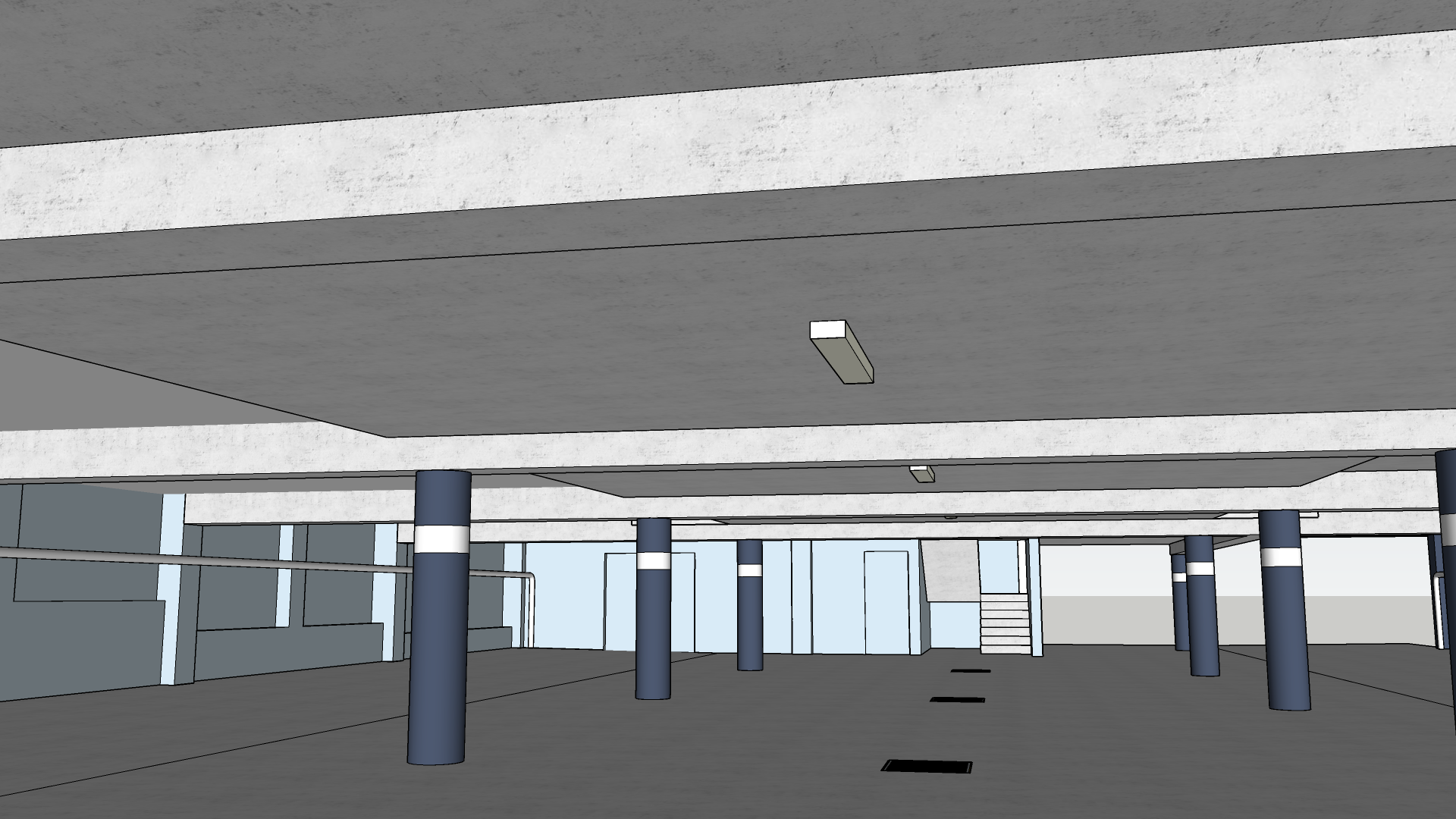
Arcade Lower 2

Arcade Upper 1
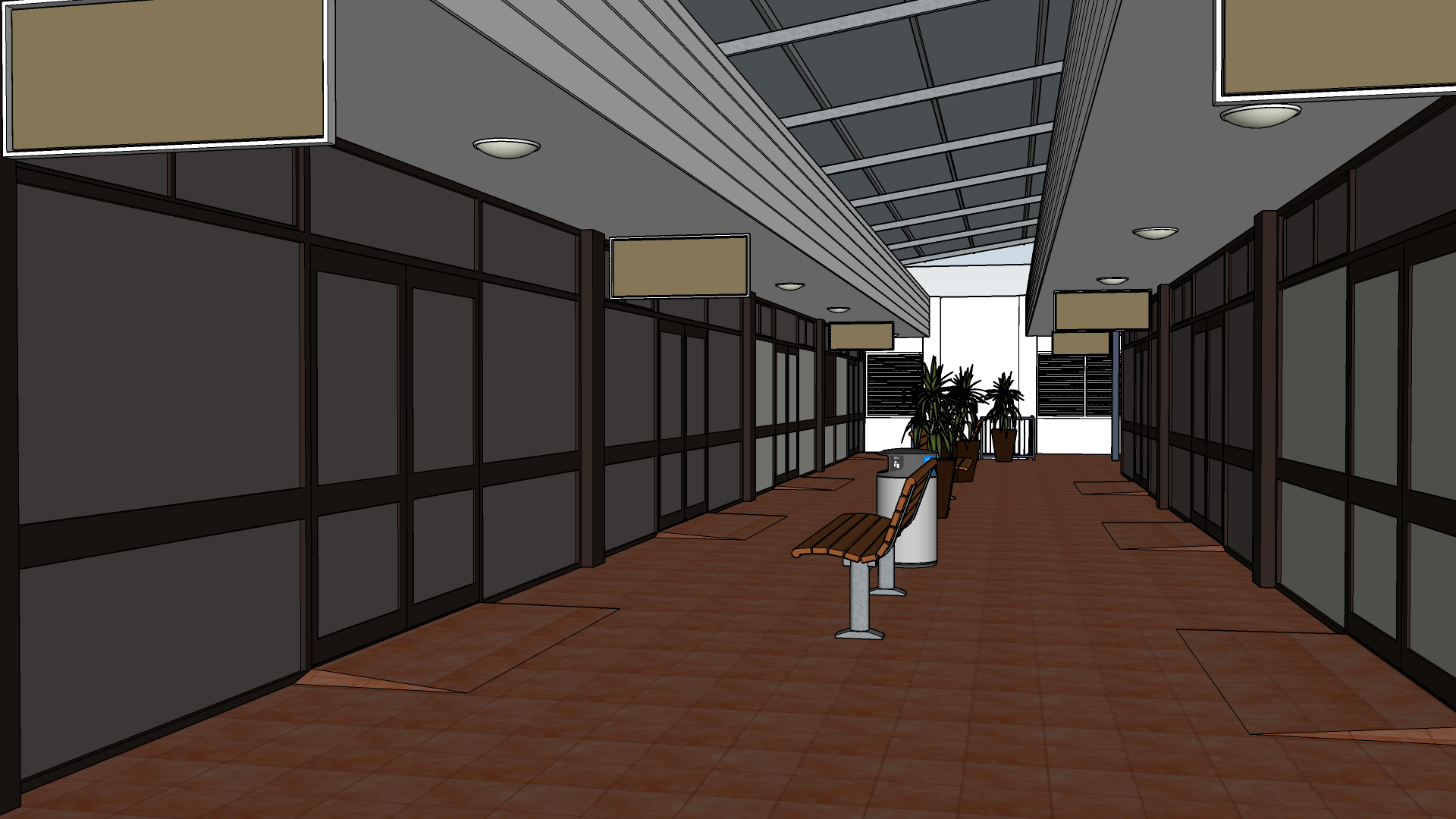
Arcade Upper 2
We can supply this model in any format required by the client.
We can also supply in a real time 3D engine. This allows clients to wander freely around the model and take screen captures at their leisure. This can also be supplied for use in a VR Headse such as the Oculus Rift or HTC Vive
Below are some screen captures from the 3D engine file as well as a link to the 3D Engine File.

Arcade Screen 1

Arcade Screen 2

Arcade Screen 3
